Moment Tensors: Decomposition and Catalog Reading#
Colab note: This notebook is designed to run on Google Colab. The first code cell installs dependencies.
Learning objectives: By the end of this notebook you should be able to:
Explain why moment tensors are symmetric and diagonalizable (6 independent components)
Split M into ISO + DEV; then DEV → DC + CLVD using eigenvalues
Use the δ diagnostic to quantify non-DC content
Visualize P-wave radiation patterns for DC, CLVD, and ISO sources
Read a USGS moment tensor (components + derived %DC-style diagnostics)
Classify source processes by their ISO/DC/CLVD content
Key concepts:
Symmetry: \(\mathbf{M} = \mathbf{M}^T\) → 6 independent components
ISO/DEV split: \(\mathbf{M}_\text{ISO} = \frac{\text{tr}(\mathbf{M})}{3}\mathbf{I}\), \(\mathbf{M}_\text{DEV} = \mathbf{M} - \mathbf{M}_\text{ISO}\)
DC eigenvalues: \((+M_0,\ 0,\ -M_0)\) → shear faulting
δ diagnostic: \(\delta = \varphi_2 / \max(|\varphi_1|, |\varphi_3|)\); \(\delta=0\) pure DC, \(|\delta|=0.5\) pure CLVD
Prerequisites: Module 6 (earthquake location), linear algebra (eigenvalues/eigenvectors)
Reference: Shearer (2009), Introduction to Seismology, Chapter 9.2
Notebook Outline:
Prediction prompt: Before running any code, predict: a pure explosion has eigenvalues \((1, 1, 1)\). How many nodal planes does its P-wave radiation pattern have?
# Install dependencies (for Google Colab or missing packages)
import sys
# Check if running in Colab
try:
import google.colab
IN_COLAB = True
print("Running in Google Colab")
except:
IN_COLAB = False
print("Running in local environment")
# Install required packages if needed
required_packages = {
'numpy': 'numpy',
'matplotlib': 'matplotlib',
'requests': 'requests'
}
# Optional packages
optional_packages = {
'obspy': 'obspy'
}
missing_packages = []
for package, pip_name in required_packages.items():
try:
__import__(package)
print(f"✓ {package} is already installed")
except ImportError:
missing_packages.append(pip_name)
print(f"✗ {package} not found")
for package, pip_name in optional_packages.items():
try:
__import__(package)
print(f"✓ {package} is already installed (optional)")
except ImportError:
print(f"⊘ {package} not found (optional — beachball plots will be skipped)")
if missing_packages:
print(f"\nInstalling missing packages: {', '.join(missing_packages)}")
import subprocess
subprocess.check_call([sys.executable, "-m", "pip", "install", "-q"] + missing_packages)
print("✓ Installation complete!")
else:
print("\n✓ All required packages are installed!")
Running in local environment
✓ numpy is already installed
✓ matplotlib is already installed
✓ requests is already installed
✓ obspy is already installed (optional)
✓ All required packages are installed!
Setup: Imports and plotting defaults#
import numpy as np
import matplotlib.pyplot as plt
import requests
# Optional: ObsPy beachball plotting
try:
from obspy.imaging.beachball import beachball
_HAS_OBSPY = True
except Exception:
_HAS_OBSPY = False
# Reproducibility
np.random.seed(42)
np.set_printoptions(precision=4, suppress=True)
# Plotting defaults (consistent with other course notebooks)
plt.rcParams['figure.figsize'] = (12, 6)
plt.rcParams['font.size'] = 11
plt.rcParams['axes.labelsize'] = 12
plt.rcParams['axes.titlesize'] = 13
plt.rcParams['axes.titleweight'] = 'bold'
print("✓ Imports and plotting defaults loaded")
✓ Imports and plotting defaults loaded
Part A: Symmetry and Eigenframes#
A1. Why symmetric?#
The moment tensor must be symmetric (\(\mathbf{M} = \mathbf{M}^T\)) because conservation of angular momentum forbids net torque from the equivalent force system. A general 3×3 matrix has 9 components, but symmetry reduces this to 6 independent components.
Prediction prompt: If we start with an arbitrary 3×3 matrix A and interpret it as a “moment tensor,” what is physically wrong? How many independent parameters does a symmetric 3×3 matrix have?
# Symmetrize an arbitrary matrix to make a valid moment tensor
def symmetrize(A):
"""Force a matrix to be symmetric: M = (A + A^T) / 2"""
return 0.5 * (A + A.T)
# Start with a random 3x3 matrix
A = np.random.randn(3, 3)
M = symmetrize(A)
print("A (raw, non-symmetric):")
print(A)
print(f"\nM (symmetrized):")
print(M)
print(f"\nSymmetry check ||M - M^T|| = {np.linalg.norm(M - M.T):.2e}")
print(f"Number of independent components: {len(M[np.triu_indices(3)])}")
# Verify: upper triangle contains all independent info
print(f"\nUpper triangle values: {M[np.triu_indices(3)]}")
A (raw, non-symmetric):
[[ 0.4967 -0.1383 0.6477]
[ 1.523 -0.2342 -0.2341]
[ 1.5792 0.7674 -0.4695]]
M (symmetrized):
[[ 0.4967 0.6924 1.1135]
[ 0.6924 -0.2342 0.2666]
[ 1.1135 0.2666 -0.4695]]
Symmetry check ||M - M^T|| = 0.00e+00
Number of independent components: 6
Upper triangle values: [ 0.4967 0.6924 1.1135 -0.2342 0.2666 -0.4695]
A2. Eigen-decomposition (principal axes)#
Because \(\mathbf{M}\) is symmetric, it can always be diagonalized:
Eigenvectors (columns of \(\mathbf{V}\)) = principal axes → orientation
Eigenvalues (\(\lambda_1 \geq \lambda_2 \geq \lambda_3\)) → source type
Prediction prompt: Why do we care about diagonalization? What does it separate?
# Eigen-decomposition of our symmetric moment tensor
vals, vecs = np.linalg.eigh(M) # eigh is for symmetric matrices (guaranteed real eigenvalues)
# Sort eigenvalues in descending order (convention: λ1 ≥ λ2 ≥ λ3)
idx = np.argsort(vals)[::-1]
vals = vals[idx]
vecs = vecs[:, idx]
print("Eigenvalues (descending):", vals)
print(f"\nEigenvectors (columns of V):")
print(vecs)
print(f"\nOrthonormality check V^T V:")
print(vecs.T @ vecs)
# Verify reconstruction: M = V diag(λ) V^T
M_recon = vecs @ np.diag(vals) @ vecs.T
print(f"\nReconstruction error ||M - V Λ V^T|| = {np.linalg.norm(M - M_recon):.2e}")
Eigenvalues (descending): [ 1.5274 -0.5028 -1.2315]
Eigenvectors (columns of V):
[[ 0.7844 -0.205 -0.5854]
[ 0.3823 0.903 0.196 ]
[ 0.4884 -0.3775 0.7867]]
Orthonormality check V^T V:
[[ 1. -0. -0.]
[-0. 1. 0.]
[-0. 0. 1.]]
Reconstruction error ||M - V Λ V^T|| = 8.46e-16
Part B: ISO/DEV Split#
The moment tensor can be decomposed into two physically distinct parts:
Prediction prompt: If you add \(c \cdot \mathbf{I}\) to a pure DC tensor, what changes qualitatively? Does the DC part change, or only the ISO part?
def iso_part(M):
"""Compute isotropic part: M_iso = (tr(M)/3) * I"""
return (np.trace(M) / 3.0) * np.eye(3)
def dev_part(M):
"""Compute deviatoric part: M_dev = M - M_iso (trace = 0)"""
return M - iso_part(M)
M_iso = iso_part(M)
M_dev = dev_part(M)
print("=== ISO/DEV Decomposition ===")
print(f"tr(M) = {np.trace(M):.4f}")
print(f"tr(M_iso) = {np.trace(M_iso):.4f} (should equal tr(M))")
print(f"tr(M_dev) = {np.trace(M_dev):.4e} (should be ~0)")
print(f"\nM_iso:")
print(M_iso)
print(f"\nM_dev:")
print(M_dev)
print(f"\nReconstruction check ||M - (M_iso + M_dev)|| = {np.linalg.norm(M - (M_iso + M_dev)):.2e}")
=== ISO/DEV Decomposition ===
tr(M) = -0.2069
tr(M_iso) = -0.2069 (should equal tr(M))
tr(M_dev) = -5.5511e-17 (should be ~0)
M_iso:
[[-0.069 -0. -0. ]
[-0. -0.069 -0. ]
[-0. -0. -0.069]]
M_dev:
[[ 0.5657 0.6924 1.1135]
[ 0.6924 -0.1652 0.2666]
[ 1.1135 0.2666 -0.4005]]
Reconstruction check ||M - (M_iso + M_dev)|| = 0.00e+00
Part C: DEV → DC + CLVD Decomposition#
This is the key algorithm of the lab. Given a moment tensor, we decompose it completely:
Algorithm (in principal axes of \(\mathbf{M}_\text{DEV}\)):
Compute \(\mathbf{M}_\text{DEV}\)
Eigen-decompose → \(\varphi_1 \geq \varphi_2 \geq \varphi_3\) (sum = 0)
Best-fitting DC amplitude: \(M_0^\text{DC} = (\varphi_1 - \varphi_3)/2\)
DC diagonal: \(\text{diag}(M_0^\text{DC},\ 0,\ -M_0^\text{DC})\)
CLVD diagonal: \(\text{diag}(\varphi_2/2,\ -\varphi_2,\ \varphi_2/2)\)
Rotate both back with eigenvectors
δ diagnostic: \(\delta = \varphi_2 / \max(|\varphi_1|, |\varphi_3|)\)
Prediction prompt: What happens when \(\varphi_2 = 0\)? What does \(\delta = 0\) mean physically?
def eig_sorted_sym(M):
"""Eigen-decompose a symmetric matrix, return eigenvalues sorted descending."""
vals, vecs = np.linalg.eigh(M)
idx = np.argsort(vals)[::-1]
return vals[idx], vecs[:, idx]
def dc_clvd_decomposition(M):
"""
Full moment tensor decomposition: M = ISO + DC + CLVD
Returns dict with all components, eigenvalues, and diagnostics.
"""
# Step 1: ISO/DEV split
M_iso = iso_part(M)
M_dev = M - M_iso
# Step 2: Eigen-decompose deviatoric part
phi, V = eig_sorted_sym(M_dev)
phi1, phi2, phi3 = phi
# Step 3-4: Best-fitting DC
M0_dc = (phi1 - phi3) / 2.0
MDC_diag = np.diag([M0_dc, 0.0, -M0_dc])
# Step 5: CLVD remainder (in principal axes)
MCLVD_diag = np.diag([phi2 / 2.0, -phi2, phi2 / 2.0])
# Step 6: Rotate back to original frame
MDC = V @ MDC_diag @ V.T
MCLVD = V @ MCLVD_diag @ V.T
# δ diagnostic
denom = max(abs(phi1), abs(phi3))
delta = phi2 / denom if denom > 0 else 0.0
return {
"M_iso": M_iso,
"M_dev": M_dev,
"M_dc": MDC,
"M_clvd": MCLVD,
"eig_dev": phi,
"V_dev": V,
"M0_dc": M0_dc,
"delta": delta,
"recon_error": np.linalg.norm(M_dev - (MDC + MCLVD))
}
# Test on our random tensor
out = dc_clvd_decomposition(M)
print("=== Full Decomposition: M = ISO + DC + CLVD ===")
print(f"DEV eigenvalues φ = {out['eig_dev']}")
print(f"δ = {out['delta']:.4f} (0 = pure DC, ±0.5 = pure CLVD)")
print(f"M0_dc = {out['M0_dc']:.4f}")
print(f"tr(M) = {np.trace(M):.4f} (ISO content)")
print(f"Reconstruction error ||DEV - (DC + CLVD)|| = {out['recon_error']:.2e}")
print(f"\n--- Interpretation ---")
if abs(out['delta']) < 0.05:
print("→ Nearly pure double couple (tectonic earthquake-like)")
elif abs(out['delta']) > 0.4:
print("→ Strongly non-DC (CLVD-dominated)")
else:
print(f"→ Mixed source: {100*(1-2*abs(out['delta'])):.0f}% DC + {100*2*abs(out['delta']):.0f}% CLVD")
=== Full Decomposition: M = ISO + DC + CLVD ===
DEV eigenvalues φ = [ 1.5964 -0.4338 -1.1626]
δ = -0.2717 (0 = pure DC, ±0.5 = pure CLVD)
M0_dc = 1.3795
tr(M) = -0.2069 (ISO content)
Reconstruction error ||DEV - (DC + CLVD)|| = 1.06e+00
--- Interpretation ---
→ Mixed source: 46% DC + 54% CLVD
C2. Verify with “pure” source types#
We construct canonical tensors and confirm our decomposition recovers the expected δ values:
Pure DC: eigenvalues \((+1, 0, -1)\) → \(\delta = 0\)
Pure CLVD: eigenvalues \((+2, -1, -1)\) → \(|\delta| = 0.5\)
Pure ISO: \(c \cdot \mathbf{I}\) → DEV eigenvalues all zero
We rotate each with a random rotation matrix to verify that the decomposition works regardless of orientation.
def random_rotation():
"""Generate a random 3D rotation matrix via QR decomposition."""
Q, _ = np.linalg.qr(np.random.randn(3, 3))
if np.linalg.det(Q) < 0:
Q[:, 0] *= -1 # ensure right-handed
return Q
def make_tensor_from_diag(diag_vals, add_iso=0.0):
"""Build a moment tensor from eigenvalues, optionally adding isotropic part."""
V = random_rotation()
M = V @ np.diag(diag_vals) @ V.T + add_iso * np.eye(3)
return M
# Pure DC: eigenvalues (+1, 0, -1), no ISO
M_dc_pure = make_tensor_from_diag([1.0, 0.0, -1.0])
# Pure CLVD: eigenvalues (+2, -1, -1), no ISO
M_clvd_pure = make_tensor_from_diag([2.0, -1.0, -1.0])
# Pure ISO: c * I (no deviatoric)
M_iso_pure = 3.0 * np.eye(3)
# Mixed: DC + ISO
M_mixed = make_tensor_from_diag([1.0, 0.0, -1.0], add_iso=2.0)
print("=== Verification with Pure Source Types ===\n")
for name, Mtest in [("Pure DC", M_dc_pure),
("Pure CLVD", M_clvd_pure),
("Pure ISO", M_iso_pure),
("DC + ISO", M_mixed)]:
o = dc_clvd_decomposition(Mtest)
print(f"--- {name} ---")
print(f" tr(M) = {np.trace(Mtest):.4f}")
print(f" DEV eigenvalues = {o['eig_dev']}")
print(f" δ = {o['delta']:.4f}")
print(f" M0_dc = {o['M0_dc']:.4f}")
print(f" Recon error = {o['recon_error']:.2e}")
print()
=== Verification with Pure Source Types ===
--- Pure DC ---
tr(M) = -0.0000
DEV eigenvalues = [ 1. 0. -1.]
δ = 0.0000
M0_dc = 1.0000
Recon error = 5.92e-16
--- Pure CLVD ---
tr(M) = 0.0000
DEV eigenvalues = [ 2. -1. -1.]
δ = -0.5000
M0_dc = 1.5000
Recon error = 2.45e+00
--- Pure ISO ---
tr(M) = 9.0000
DEV eigenvalues = [0. 0. 0.]
δ = 0.0000
M0_dc = 0.0000
Recon error = 0.00e+00
--- DC + ISO ---
tr(M) = 6.0000
DEV eigenvalues = [ 1. 0. -1.]
δ = 0.0000
M0_dc = 1.0000
Recon error = 9.58e-16
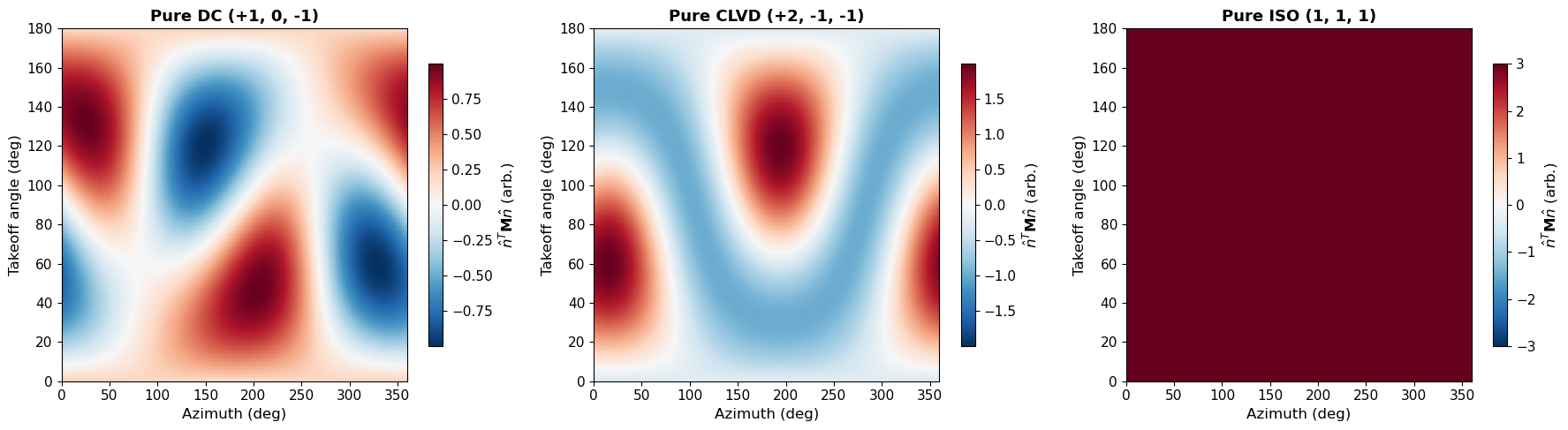
Part D: P-wave Radiation Proxy#
We use a geometric proxy for far-field P-wave amplitude:
This is not the full Green’s-function solution, but it isolates how ISO/DC/CLVD change the angular dependence of radiated energy. Positive values indicate compression (push outward), negative values indicate dilatation (pull inward), and zero defines nodal planes.
Prediction prompt: Which source type has no nodal planes? Which has two nodal planes?
def p_proxy(M, nhat):
"""Compute far-field P-wave radiation proxy: n^T M n"""
nhat = np.asarray(nhat, dtype=float)
nhat = nhat / np.linalg.norm(nhat)
return nhat.T @ M @ nhat
def sample_sphere(n_theta=91, n_phi=181):
"""Sample unit vectors on a sphere for radiation pattern visualization."""
thetas = np.linspace(0, np.pi, n_theta)
phis = np.linspace(0, 2 * np.pi, n_phi)
TH, PH = np.meshgrid(thetas, phis, indexing="ij")
x = np.sin(TH) * np.cos(PH)
y = np.sin(TH) * np.sin(PH)
z = np.cos(TH)
return TH, PH, x, y, z
def plot_p_proxy(M, title="P-wave radiation proxy", ax=None):
"""Plot P-wave radiation pattern on a theta-phi grid."""
TH, PH, x, y, z = sample_sphere()
A = np.zeros_like(x)
for i in range(x.shape[0]):
for j in range(x.shape[1]):
A[i, j] = p_proxy(M, [x[i, j], y[i, j], z[i, j]])
if ax is None:
fig, ax = plt.subplots(1, 1, figsize=(10, 4.5))
vmax = max(abs(A.min()), abs(A.max()))
im = ax.imshow(A, aspect="auto", origin="lower",
extent=[0, 360, 0, 180], cmap='RdBu_r',
vmin=-vmax, vmax=vmax)
plt.colorbar(im, ax=ax, label=r"$\hat{n}^T \mathbf{M} \hat{n}$ (arb.)", shrink=0.8)
ax.set_xlabel("Azimuth (deg)", fontsize=12)
ax.set_ylabel("Takeoff angle (deg)", fontsize=12)
ax.set_title(title, fontsize=13, fontweight='bold')
return ax
# Compare three canonical source types
fig, axes = plt.subplots(1, 3, figsize=(18, 5))
plot_p_proxy(M_dc_pure, "Pure DC (+1, 0, -1)", ax=axes[0])
plot_p_proxy(M_clvd_pure, "Pure CLVD (+2, -1, -1)", ax=axes[1])
plot_p_proxy(M_iso_pure, "Pure ISO (1, 1, 1)", ax=axes[2])
plt.tight_layout()
plt.show()
print("Key observations:")
print(" DC: Four-lobed pattern with two nodal planes (zero crossings)")
print(" CLVD: Axially symmetric pattern with conical nodal surfaces")
print(" ISO: Uniform amplitude in ALL directions (no nodal planes)")
Key observations:
DC: Four-lobed pattern with two nodal planes (zero crossings)
CLVD: Axially symmetric pattern with conical nodal surfaces
ISO: Uniform amplitude in ALL directions (no nodal planes)
Part E: Reading a USGS Moment Tensor#
USGS event detail pages provide moment tensor components in the geographic (r, θ, φ) basis:
tensor-mrr, tensor-mtt, tensor-mpp, tensor-mrt, tensor-mrp, tensor-mtp
This section shows how to:
Fetch an event from USGS
Build the 3×3 tensor from these 6 components
Apply our decomposition
Compare with the catalog’s reported %DC, %CLVD, %ISO
Checklist for reading a catalog MT:
Scale: \(M_w\) / \(M_0\)
ISO sign: \(\text{tr}(\mathbf{M}) > 0\) (explosive) or \(< 0\) (implosive)
DEV eigenvalues: compute \(\varphi_1 \geq \varphi_2 \geq \varphi_3\)
DC vs CLVD: check \(\varphi_2\) (or \(\delta\))
Orientation: eigenvectors / P-T-N axes / nodal planes
Interpretation: match ISO/DC/CLVD content to a physical source model
Note: This section requires internet access at runtime.
def fetch_usgs_event_geojson(event_id):
"""Fetch event detail GeoJSON from USGS FDSN earthquake API."""
url = (
"https://earthquake.usgs.gov/fdsnws/event/1/query"
f"?eventid={event_id}&format=geojson"
)
r = requests.get(url, timeout=30)
r.raise_for_status()
return r.json()
def extract_usgs_moment_tensor(geojson):
"""
Extract moment tensor components from USGS GeoJSON and build 3x3 matrix.
Components are in the r-θ-φ (up, south, east) basis:
mrr, mtt, mpp, mrt, mrp, mtp
"""
products = geojson.get("properties", {}).get("products", {})
mts = products.get("moment-tensor", [])
if not mts:
raise ValueError("No USGS moment-tensor product found for this event.")
mt = mts[0] # use first solution
props = mt.get("properties", {})
keys = ["tensor-mrr", "tensor-mtt", "tensor-mpp",
"tensor-mrt", "tensor-mrp", "tensor-mtp"]
if not all(k in props for k in keys):
raise ValueError("Moment tensor components not found in expected fields.")
mrr = float(props["tensor-mrr"])
mtt = float(props["tensor-mtt"])
mpp = float(props["tensor-mpp"])
mrt = float(props["tensor-mrt"])
mrp = float(props["tensor-mrp"])
mtp = float(props["tensor-mtp"])
# Assemble symmetric tensor in r-θ-φ basis
M = np.array([[mrr, mrt, mrp],
[mrt, mtt, mtp],
[mrp, mtp, mpp]], dtype=float)
return M, props
# --- Fetch and analyze a real earthquake ---
event_id = "us6000s94q" # Change this to any USGS event ID with an MT solution
try:
gj = fetch_usgs_event_geojson(event_id)
M_usgs, props = extract_usgs_moment_tensor(gj)
o = dc_clvd_decomposition(M_usgs)
print(f"=== USGS Event: {gj['properties'].get('title')} ===")
print(f"\nTensor (r, θ, φ basis):")
print(M_usgs)
print(f"\n--- Our Decomposition ---")
print(f"tr(M) = {np.trace(M_usgs):.4e}")
print(f"DEV eigenvalues = {o['eig_dev']}")
print(f"δ = {o['delta']:.4f}")
print(f"M0_dc = {o['M0_dc']:.4e}")
print(f"\n--- USGS Catalog Values ---")
for k in ["percent-double-couple", "percent-clvd", "percent-isotropic"]:
if k in props:
print(f" {k}: {props[k]}")
print(f"\n--- Interpretation ---")
if abs(o['delta']) < 0.1:
print("→ Mostly double couple: consistent with tectonic shear faulting")
elif abs(o['delta']) < 0.3:
print("→ Moderate CLVD component: could be complex rupture or inversion artifact")
else:
print("→ Large CLVD component: may indicate non-shear source process")
except Exception as e:
print(f"USGS fetch/parse failed: {repr(e)}")
print("This cell requires internet access. You can try a different event_id.")
=== USGS Event: M 6.4 - 53 km WNW of Port-Olry, Vanuatu ===
Tensor (r, θ, φ basis):
[[ 1.6708e+18 1.8726e+18 -3.0485e+18]
[ 1.8726e+18 -1.3481e+18 1.7241e+18]
[-3.0485e+18 1.7241e+18 -3.2280e+17]]
--- Our Decomposition ---
tr(M) = -1.0000e+14
DEV eigenvalues = [ 3.9400e+18 5.7675e+17 -4.5168e+18]
δ = 0.1277
M0_dc = 4.2284e+18
--- USGS Catalog Values ---
percent-double-couple: 0.7446
--- Interpretation ---
→ Moderate CLVD component: could be complex rupture or inversion artifact
Exercises#
📝 Exercise 1 (ESS 412 - Undergraduate)#
Task: Build a moment tensor that is 50% ISO + 50% DC (you choose the scale). Then:
Compute \(\text{tr}(\mathbf{M})\) and \(\delta\)
Run
dc_clvd_decomposition()on your tensorVerify that the ISO and DC parts match your construction
Interpret: what geophysical process might produce this combination?
# ===== YOUR CODE HERE =====
# Hint: A 50% ISO + 50% DC tensor could be constructed as:
# M_dc_diag = np.diag([M0, 0, -M0]) for the DC part
# M_iso = c * np.eye(3) for the ISO part
# M_total = M_dc + M_iso
# Choose M0 and c so that |M_iso| and |M_dc| are comparable.
# ===== END YOUR CODE =====
📝 Exercise 2 (ESS 412 - Undergraduate)#
Task: Create two different moment tensors with the same eigenvalues but different eigenvectors (i.e., different orientations).
Use
make_tensor_from_diag([1.0, 0.0, -1.0])twice (each call uses a random rotation)Run
dc_clvd_decomposition()on bothCompare: what is the same? What is different?
Plot the P-wave radiation proxy for both. What changes?
Explain: physically, what does changing eigenvectors correspond to?
# ===== YOUR CODE HERE =====
# Create two tensors with same eigenvalues but different orientations:
# M1 = make_tensor_from_diag([1.0, 0.0, -1.0])
# M2 = make_tensor_from_diag([1.0, 0.0, -1.0])
#
# Decompose both and compare:
# o1 = dc_clvd_decomposition(M1)
# o2 = dc_clvd_decomposition(M2)
#
# Plot both radiation patterns:
# fig, axes = plt.subplots(1, 2, figsize=(14, 5))
# plot_p_proxy(M1, "DC orientation 1", ax=axes[0])
# plot_p_proxy(M2, "DC orientation 2", ax=axes[1])
# plt.tight_layout()
# plt.show()
# ===== END YOUR CODE =====
📝 Exercise 3 (ESS 512 - Graduate Only)#
Task: Fetch a USGS earthquake of your choice, decompose it, and classify the source.
Go to USGS Earthquake Catalog and find an event with a moment tensor solution. Copy the event ID (e.g.,
us7000jg4q).Use
fetch_usgs_event_geojson()andextract_usgs_moment_tensor()to get the tensor.Run
dc_clvd_decomposition()and report \(\text{tr}(\mathbf{M})\), \(\delta\), and \(M_0^\text{DC}\).Compare your computed δ with the USGS-reported
percent-double-coupleandpercent-clvd.Is the non-DC component (if any) physically meaningful, or likely an artifact? Justify your answer considering:
Station coverage (azimuthal gap)
Event depth and location
Tectonic setting
Plot the P-wave radiation proxy for the full tensor and for just the DC part. How different are they?
Hint: Try comparing a well-constrained tectonic event (high %DC) with a volcanic or induced seismicity event (potentially lower %DC).
# ===== GRADUATE EXERCISE 3 (ESS 512) =====
# Uncomment and implement:
# # Choose your event
# my_event_id = "..." # paste USGS event ID here
#
# gj = fetch_usgs_event_geojson(my_event_id)
# M_my, props_my = extract_usgs_moment_tensor(gj)
# o_my = dc_clvd_decomposition(M_my)
#
# print(f"Event: {gj['properties'].get('title')}")
# print(f"tr(M) = {np.trace(M_my):.4e}")
# print(f"δ = {o_my['delta']:.4f}")
# print(f"M0_dc = {o_my['M0_dc']:.4e}")
#
# # Compare radiation patterns: full tensor vs DC-only
# fig, axes = plt.subplots(1, 2, figsize=(14, 5))
# plot_p_proxy(M_my, "Full MT", ax=axes[0])
# plot_p_proxy(o_my['M_dc'], "DC part only", ax=axes[1])
# plt.tight_layout()
# plt.show()
# ===== END GRADUATE EXERCISE =====
Wrap-up: What you should be able to explain (verbally)#
After completing this notebook, you should be able to answer:
Conceptual:
Why is the moment tensor symmetric, and how many independent components does it have?
What does the trace of the moment tensor tell you physically?
What eigenvalues define a pure double couple? A pure CLVD?
Why can’t far-field P-wave data distinguish between the two nodal planes of a DC?
Name a geophysical process that would produce a significant ISO component.
Mathematical: 6. Write the ISO/DEV decomposition formulas. 7. Given DEV eigenvalues \(\varphi_1, \varphi_2, \varphi_3\), compute \(M_0^\text{DC}\) and \(\delta\). 8. Why must \(\varphi_1 + \varphi_2 + \varphi_3 = 0\) for the deviatoric part?
Practical: 9. Given a USGS MT with 80% DC and 20% CLVD, is the CLVD necessarily real? 10. How would you distinguish an explosion from an earthquake using moment tensors?
Summary and Connections#
Key Takeaways#
The moment tensor is a compact source representation:
6 independent components (symmetric 3×3 matrix)
Diagonalization separates orientation (eigenvectors) from source type (eigenvalue ratios)
Three-part decomposition reveals source physics:
ISO (\(\text{tr}(\mathbf{M})\)): volume change (explosion/implosion/opening)
DC (\(\varphi_2 = 0\)): shear faulting (most tectonic earthquakes)
CLVD (\(\varphi_2 \neq 0\)): complex deformation or inversion artifacts
The δ diagnostic is your quick classifier:
\(\delta = 0\) → pure DC (simple shear fault)
\(|\delta| = 0.5\) → pure CLVD
Non-zero CLVD in tectonic events is often an artifact, not real physics
Connections to Other Modules#
Module 3 (Ray Theory):
Takeoff angles determine which part of the radiation pattern each station samples
Station distribution directly affects how well the MT can be constrained
Module 5 (Surface Waves):
Long-period surface waves are the primary data for global MT inversion (GCMT catalog)
Surface wave excitation depends on source depth and mechanism
Module 6 (Earthquake Location):
Accurate locations are a prerequisite for moment tensor inversion
Location errors propagate into mechanism errors
The MT is estimated at the centroid (center of moment release), not the hypocenter
Further Reading#
Shearer, P. M. (2009), Introduction to Seismology, 2nd ed., Chapter 9.2
Jost, M. L., & Herrmann, R. B. (1989). A student’s guide to and review of moment tensors. Seismological Research Letters, 60(2), 37–57.
Tape, W., & Tape, C. (2012). A geometric setting for moment tensors. Geophysical Journal International, 190(1), 499–514.