Travel Time Tomography#
![]()
Learning Objectives:
Solve the Eikonal equation for travel times
Perform iterative non-linear tomography
Invert travel time residuals for velocity perturbations
Assess model resolution with checkerboard tests
Prerequisites: Inverse theory, Optimization
Reference: Shearer, Chapter 5 (Travel Time Tomography)
Notebook Outline:
[A4. Build the tomography matrix (G)](#A4-Build-the-tomography-matrix-\G)
B3. Forward modeling with PyKonal: travel times + ray tracing
Setup: imports + helper functions#
We will use:
NumPy/SciPy for linear algebra and sparse matrices
Matplotlib for visualization
PyKonal for eikonal-based travel times + ray tracing (for the iterative part)
If you run this in Colab, you may need to install pykonal first.
# If needed (e.g., on Colab), uncomment:
# !pip -q install pykonal
import numpy as np
import matplotlib.pyplot as plt
from scipy import sparse
from scipy.sparse.linalg import lsqr
np.random.seed(7)
def cell_index(ix, iy, nx, ny):
return iy * nx + ix
def plot_model(m, nx, ny, title="", cmap="seismic", vlim=None):
M = m.reshape(ny, nx)
plt.figure(figsize=(6,4))
if vlim is None:
vmax = np.max(np.abs(M)) + 1e-12
vlim = (-vmax, vmax)
plt.imshow(M, origin="lower", cmap=cmap, vmin=vlim[0], vmax=vlim[1],
extent=(0,1,0,1), aspect="auto")
plt.colorbar(label="model value")
plt.title(title)
plt.xlabel("x"); plt.ylabel("y")
plt.tight_layout()
def sample_points_on_segment(p0, p1, n=1200):
t = np.linspace(0.0, 1.0, n)
return (1-t)[:,None]*p0 + t[:,None]*p1
A. Straight-ray travel-time tomography (block model)#
A1. Discretize the Earth into cells#
We use a 2-D unit square \([0,1]\times[0,1]\) split into \( n_x\times n_y\) cells. The model is slowness perturbation per cell:
nx, ny = 25, 20
nmodel = nx * ny
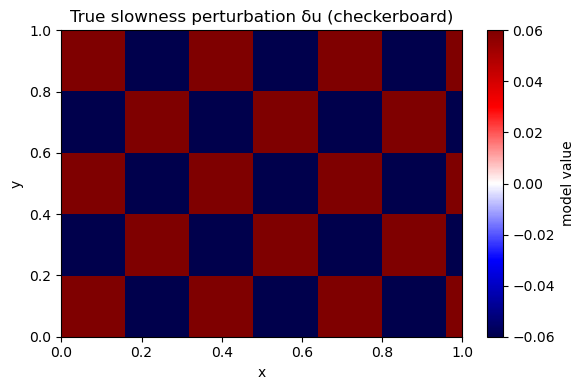
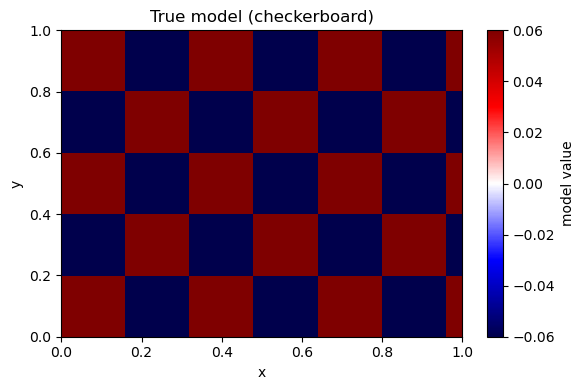
A2. Define a synthetic “true” model#
We choose a checkerboard because it makes resolution failures obvious.
Prediction: Which parts of the checkerboard will be recovered best: near the center or near corners? Why?
m_true = np.zeros(nmodel)
for iy in range(ny):
for ix in range(nx):
s = 1 if ((ix//4 + iy//4) % 2 == 0) else -1
m_true[cell_index(ix, iy, nx, ny)] = 0.06 * s
plot_model(m_true, nx, ny, title="True slowness perturbation δu (checkerboard)")
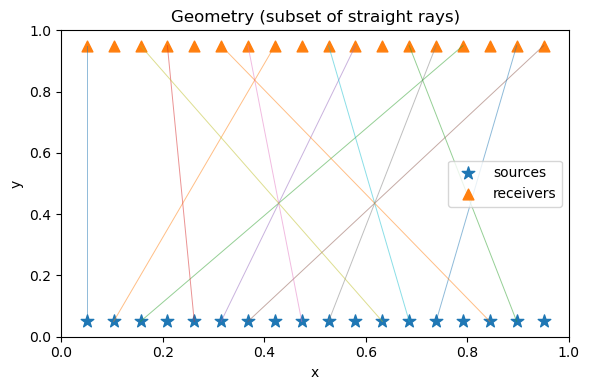
A3. Acquisition geometry: sources & receivers#
We place sources at the bottom and receivers at the top to make a simple “regional” geometry.
Prediction: With mostly near-vertical rays, will you resolve horizontal or vertical variations better?
nrec = 18
nsrc = 18
receivers = np.column_stack([np.linspace(0.05, 0.95, nrec),
np.full(nrec, 0.95)])
sources = np.column_stack([np.linspace(0.05, 0.95, nsrc),
np.full(nsrc, 0.05)])
pairs = [(s, r) for s in range(nsrc) for r in range(nrec)]
plt.figure(figsize=(6,4))
plt.scatter(sources[:,0], sources[:,1], marker="*", s=90, label="sources")
plt.scatter(receivers[:,0], receivers[:,1], marker="^", s=60, label="receivers")
for (s, r) in pairs[::25]:
p0, p1 = sources[s], receivers[r]
plt.plot([p0[0], p1[0]], [p0[1], p1[1]], lw=0.7, alpha=0.5)
plt.legend()
plt.xlim(0,1); plt.ylim(0,1)
plt.xlabel("x"); plt.ylabel("y")
plt.title("Geometry (subset of straight rays)")
plt.tight_layout()
A4. Build the tomography matrix (G)#
For straight rays, (G_{ij}) is the path length of ray i inside cell j.
We build it by:
sampling many points along each ray segment
counting which cell each sample falls into
converting counts to approximate path length
def build_G_sampling(sources, receivers, pairs, nx, ny, npts=1600):
dx = 1.0 / nx
dy = 1.0 / ny
rows, cols, vals = [], [], []
for i, (s, r) in enumerate(pairs):
p0, p1 = sources[s], receivers[r]
pts = sample_points_on_segment(p0, p1, n=npts)
x = np.clip(pts[:,0], 0.0, 1.0 - 1e-12)
y = np.clip(pts[:,1], 0.0, 1.0 - 1e-12)
ix = (x / dx).astype(int)
iy = (y / dy).astype(int)
Ltot = np.linalg.norm(p1 - p0)
ds = Ltot / (npts - 1)
cell_ids = iy * nx + ix
uniq, counts = np.unique(cell_ids, return_counts=True)
for cid, c in zip(uniq, counts):
rows.append(i)
cols.append(cid)
vals.append(c * ds)
return sparse.csr_matrix((vals, (rows, cols)),
shape=(len(pairs), nx*ny))
G = build_G_sampling(sources, receivers, pairs, nx, ny)
print("G shape:", G.shape, "nnz:", G.nnz)
G shape: (324, 500) nnz: 8344
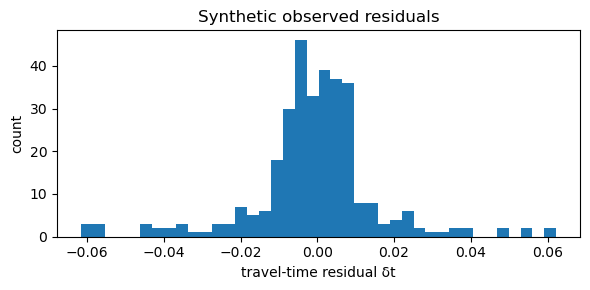
A5. Generate synthetic travel-time residuals#
We compute: $\( \mathbf{d} = G\,\mathbf{m}_{true} + \epsilon \)$
Interpretation: if \(\delta u>0\) (slower-than-reference), rays through that region arrive late (positive residual).
sigma = 0.002
d_clean = G @ m_true
d_obs = d_clean + sigma * np.random.randn(d_clean.size)
plt.figure(figsize=(6,3))
plt.hist(d_obs, bins=40)
plt.xlabel("travel-time residual δt")
plt.ylabel("count")
plt.title("Synthetic observed residuals")
plt.tight_layout()
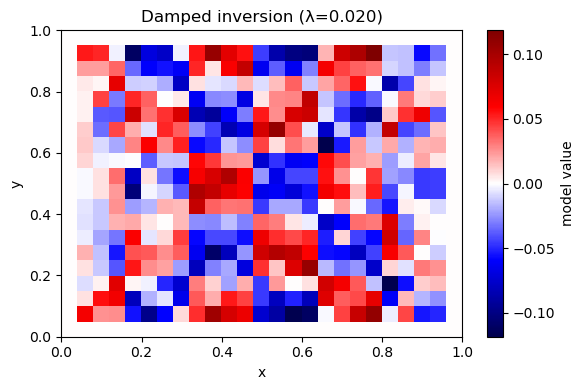
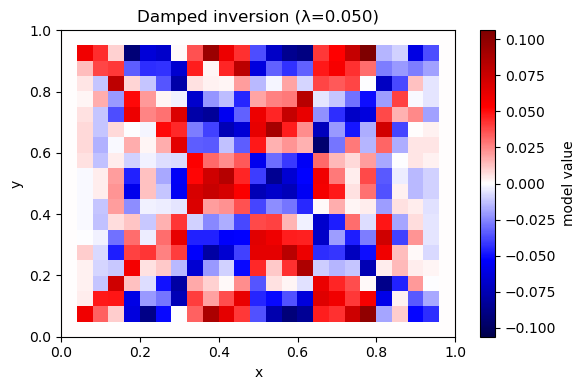
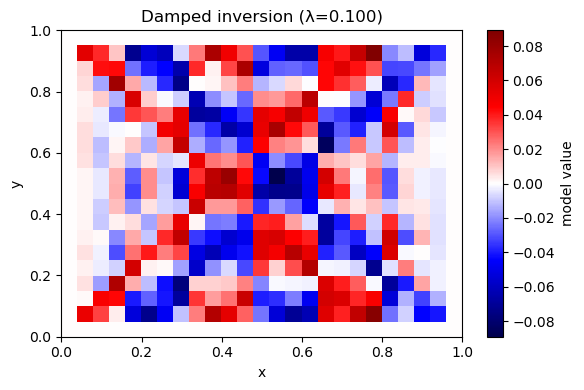
A6. Invert with damping (minimum-norm)#
Solve: $\( \min_m \|Gm-d\|^2 + \lambda^2\|m\|^2 \)$
Prediction: As \(\lambda\) increases, what happens to the model amplitude? What happens to data fit?
def invert_damped(G, d, lam):
nmodel = G.shape[1]
A = sparse.vstack([G, lam * sparse.eye(nmodel)], format="csr")
b = np.concatenate([d, np.zeros(nmodel)])
sol = lsqr(A, b, atol=1e-10, btol=1e-10, iter_lim=3000)
return sol[0], sol
for lam in [0.02, 0.05, 0.1]:
m_hat, info = invert_damped(G, d_obs, lam)
rms = np.linalg.norm(G @ m_hat - d_obs) / np.sqrt(d_obs.size)
print(f"λ={lam:.3f} rms_misfit={rms:.4f} iters={info[2]}")
plot_model(m_hat, nx, ny, title=f"Damped inversion (λ={lam:.3f})")
λ=0.020 rms_misfit=0.0007 iters=228
λ=0.050 rms_misfit=0.0012 iters=100
λ=0.100 rms_misfit=0.0021 iters=56
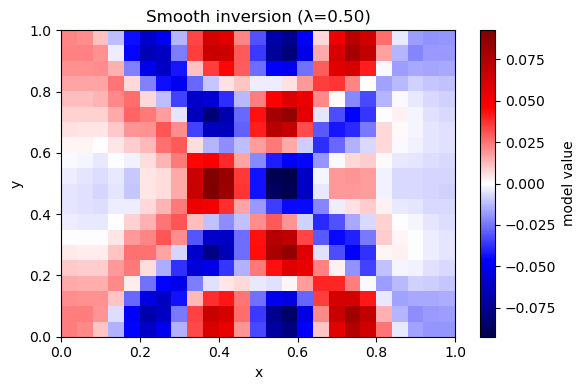
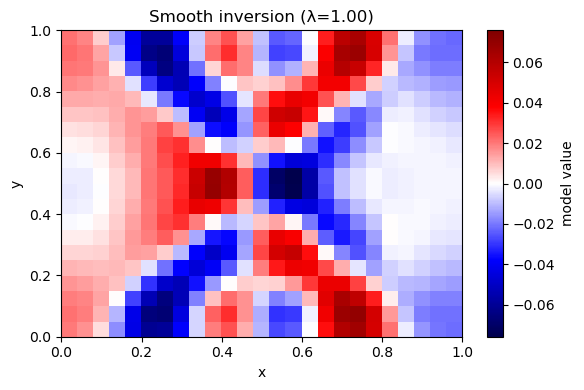
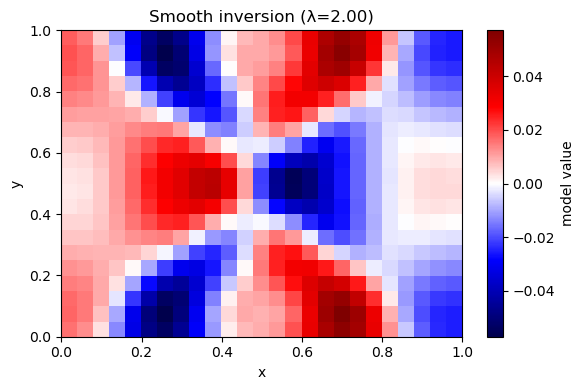
A7. Invert with smoothness (minimum-roughness)#
Solve: $\( \min_m \|Gm-d\|^2 + \lambda^2\|Lm\|^2 \)\( where \)L$ is a discrete Laplacian (cell minus neighbor average).
Prediction: Compared to damping, what kind of artifacts should smoothness suppress?
def laplacian_2d(nx, ny):
rows, cols, vals = [], [], []
eq = 0
for iy in range(ny):
for ix in range(nx):
j = cell_index(ix, iy, nx, ny)
neigh = []
if ix > 0: neigh.append(cell_index(ix-1, iy, nx, ny))
if ix < nx-1: neigh.append(cell_index(ix+1, iy, nx, ny))
if iy > 0: neigh.append(cell_index(ix, iy-1, nx, ny))
if iy < ny-1: neigh.append(cell_index(ix, iy+1, nx, ny))
rows.append(eq); cols.append(j); vals.append(-1.0)
for k in neigh:
rows.append(eq); cols.append(k); vals.append(1/len(neigh))
eq += 1
return sparse.csr_matrix((vals, (rows, cols)), shape=(nx*ny, nx*ny))
L = laplacian_2d(nx, ny)
def invert_smooth(G, d, lam, L):
A = sparse.vstack([G, lam * L], format="csr")
b = np.concatenate([d, np.zeros(L.shape[0])])
sol = lsqr(A, b, atol=1e-10, btol=1e-10, iter_lim=5000)
return sol[0], sol
for lam in [0.5, 1.0, 2.0]:
m_hat, info = invert_smooth(G, d_obs, lam, L)
rms = np.linalg.norm(G @ m_hat - d_obs) / np.sqrt(d_obs.size)
rough = np.linalg.norm(L @ m_hat) / np.sqrt(m_hat.size)
print(f"λ={lam:.2f} rms_misfit={rms:.4f} rough={rough:.4f} iters={info[2]}")
plot_model(m_hat, nx, ny, title=f"Smooth inversion (λ={lam:.2f})")
λ=0.50 rms_misfit=0.0051 rough=0.0084 iters=295
λ=1.00 rms_misfit=0.0078 rough=0.0051 iters=322
λ=2.00 rms_misfit=0.0109 rough=0.0024 iters=355
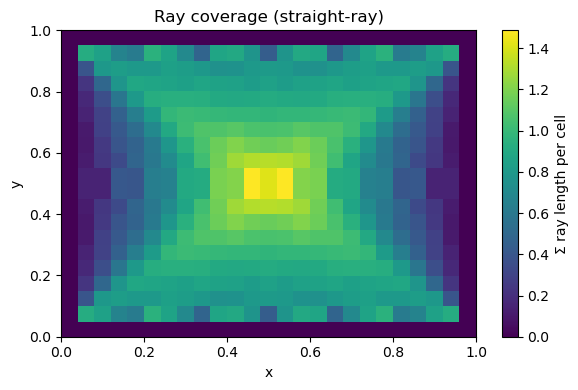
A8. Coverage map (resolution intuition)#
Cells with low coverage are weakly constrained and get “filled in” by regularization.
coverage = np.array(G.sum(axis=0)).ravel()
plt.figure(figsize=(6,4))
plt.imshow(coverage.reshape(ny, nx), origin="lower", extent=(0,1,0,1), aspect="auto")
plt.colorbar(label="Σ ray length per cell")
plt.title("Ray coverage (straight-ray)")
plt.xlabel("x"); plt.ylabel("y")
plt.tight_layout()
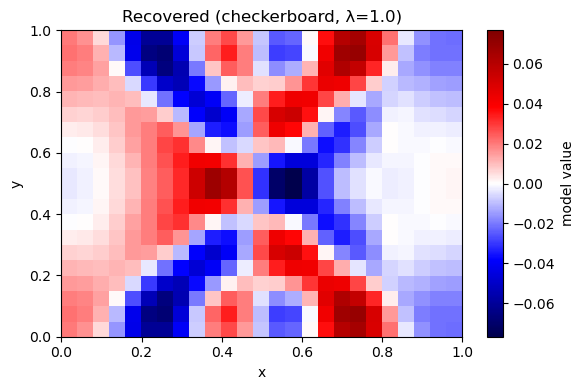
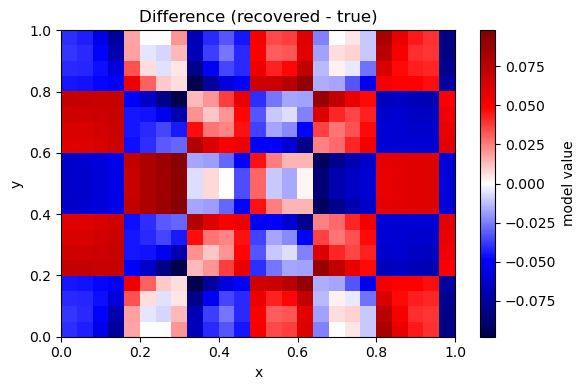
A9. Checkerboard (resolution) test#
Use noise-free data to isolate the effect of geometry + regularization.
lam = 1.0
m_rec, _ = invert_smooth(G, d_clean, lam, L)
plot_model(m_true, nx, ny, title="True model (checkerboard)")
plot_model(m_rec, nx, ny, title=f"Recovered (checkerboard, λ={lam})")
plot_model(m_rec - m_true, nx, ny, title="Difference (recovered - true)")
B. Iterative bent-ray tomography (PyKonal)#
Straight-ray tomography assumes rays do not change as the model updates. But in reality:
rays bend toward faster regions (lower slowness)
strong anomalies can invalidate straight-ray assumptions
Learning goals for Part B#
Use PyKonal to compute travel times in a heterogeneous velocity model.
Trace rays from receivers back through (\nabla T).
Build (G) from bent ray paths.
Implement a simple iterative scheme (re-linearization):
start from a smooth reference model
compute predicted times and residuals
invert for \(\delta u\)
update the model
re-trace rays
Prediction: When rays bend around a slow anomaly, will the recovered anomaly in straight-ray inversion appear too broad, too narrow, or shifted?
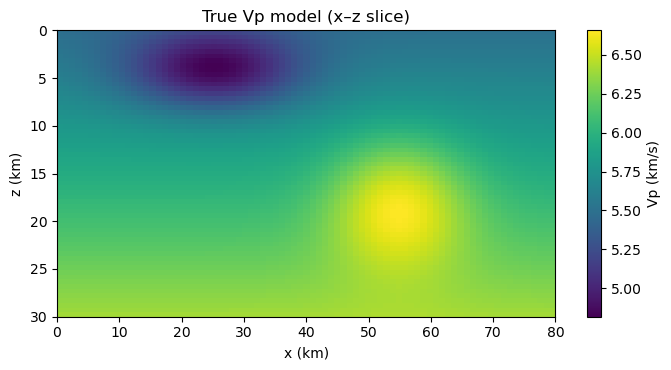
B1. Define a more “realistic” velocity model in x–z#
We switch to an x–z domain (depth increasing downward) to resemble crustal tomography.
We will:
define a background increasing velocity with depth
add a low-velocity basin and a high-velocity body
place sources at depth and receivers at the surface
try:
import pykonal
except Exception as e:
raise ImportError("PyKonal is required for Part B. Install with `pip install pykonal`.") from e
# Grid (km units)
nx3, ny3, nz3 = 81, 3, 61
x = np.linspace(0.0, 80.0, nx3)
y = np.linspace(0.0, 2.0, ny3) # thin in y
z = np.linspace(0.0, 30.0, nz3) # depth (km), z=0 surface
X, Y, Z = np.meshgrid(x, y, z, indexing="ij")
# Background velocity: increases with depth
vp0 = 5.5 + 0.03 * Z # km/s
# Low-velocity basin (near surface)
basin = -0.8 * np.exp(-((X-25.0)**2/(2*10.0**2) + (Z-4.0)**2/(2*3.0**2)))
# High-velocity body (deeper)
hv = +0.6 * np.exp(-((X-55.0)**2/(2*8.0**2) + (Z-18.0)**2/(2*5.0**2)))
vp_true = np.clip(vp0 + basin + hv, 3.0, None)
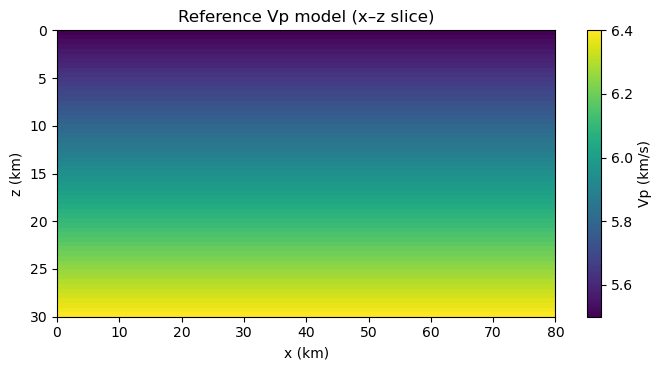
vp_ref = vp0.copy()
def show_vslice(v, title):
midy = ny3//2
plt.figure(figsize=(7,3.8))
plt.imshow(v[:,midy,:].T, origin="upper",
extent=(x.min(), x.max(), z.max(), z.min()),
aspect="auto")
plt.colorbar(label="Vp (km/s)")
plt.xlabel("x (km)"); plt.ylabel("z (km)")
plt.title(title)
plt.tight_layout()
show_vslice(vp_true, "True Vp model (x–z slice)")
show_vslice(vp_ref, "Reference Vp model (x–z slice)")
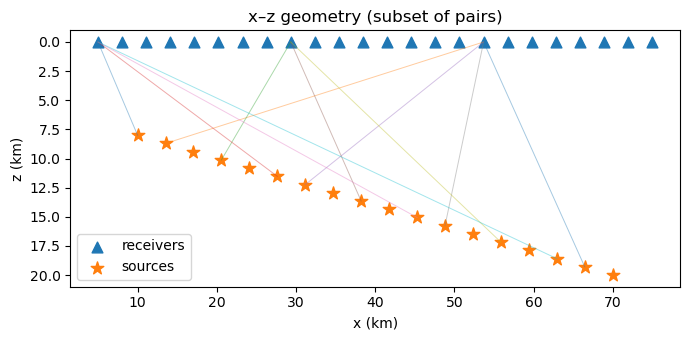
B2. Geometry: sources at depth, receivers at surface#
We simulate direct P travel times:
receivers at z=0 km
sources distributed at 8–20 km depth
nrecB = 24
nsrcB = 18
rec_x = np.linspace(5.0, 75.0, nrecB)
src_x = np.linspace(10.0, 70.0, nsrcB)
receivers_B = np.column_stack([rec_x, np.full(nrecB, 1.0), np.zeros(nrecB)]) # y=1 km, z=0
src_z = np.linspace(8.0, 20.0, nsrcB)
sources_B = np.column_stack([src_x, np.full(nsrcB, 1.0), src_z])
pairs_B = [(s, r) for s in range(nsrcB) for r in range(nrecB)]
plt.figure(figsize=(7,3.5))
plt.scatter(receivers_B[:,0], receivers_B[:,2], marker="^", s=60, label="receivers")
plt.scatter(sources_B[:,0], sources_B[:,2], marker="*", s=90, label="sources")
for (s, r) in pairs_B[::40]:
p0, p1 = sources_B[s], receivers_B[r]
plt.plot([p0[0], p1[0]], [p0[2], p1[2]], lw=0.7, alpha=0.4)
plt.gca().invert_yaxis()
plt.xlabel("x (km)"); plt.ylabel("z (km)")
plt.title("x–z geometry (subset of pairs)")
plt.legend()
plt.tight_layout()
B3. Forward modeling with PyKonal: travel times + ray tracing#
For each source:
Solve the eikonal equation for travel time field (T)
For each receiver, trace a ray following (-\nabla T)
We generate “observed” travel times in the true model.
def solve_times_and_rays(vp, sources, receivers, pairs, x, y, z):
solver = pykonal.EikonalSolver(coord_sys='cartesian')
solver.velocity.min_coords = (x.min(), y.min(), z.min())
solver.velocity.node_intervals = (x[1]-x[0], y[1]-y[0], z[1]-z[0])
solver.velocity.npts = (len(x), len(y), len(z))
solver.velocity.values = vp.astype(np.float64)
t_pred = np.zeros(len(pairs), dtype=float)
rays = [None] * len(pairs)
by_source = {}
for i,(s,r) in enumerate(pairs):
by_source.setdefault(s, []).append((i,r))
for s, idx_list in by_source.items():
src = sources[s]
solver.traveltime.values[:] = np.nan
solver.traveltime.is_outdated = True
solver.source_loc = tuple(src.tolist())
solver.solve()
tracer = pykonal.RayTracer(coord_sys='cartesian')
tracer.traveltime = solver.traveltime
for (i, r) in idx_list:
rec = receivers[r]
t_pred[i] = solver.traveltime.value(tuple(rec.tolist()))
tracer.receiver_loc = tuple(rec.tolist())
rays[i] = np.array(tracer.trace_ray())
return t_pred, rays
t_obs, rays_true = solve_times_and_rays(vp_true, sources_B, receivers_B, pairs_B, x, y, z)
print("t_obs range (s):", float(t_obs.min()), float(t_obs.max()))
---------------------------------------------------------------------------
AttributeError Traceback (most recent call last)
Cell In[14], line 32
29 rays[i] = np.array(tracer.trace_ray())
30 return t_pred, rays
---> 32 t_obs, rays_true = solve_times_and_rays(vp_true, sources_B, receivers_B, pairs_B, x, y, z)
33 print("t_obs range (s):", float(t_obs.min()), float(t_obs.max()))
Cell In[14], line 18, in solve_times_and_rays(vp, sources, receivers, pairs, x, y, z)
16 src = sources[s]
17 solver.traveltime.values[:] = np.nan
---> 18 solver.traveltime.is_outdated = True
19 solver.source_loc = tuple(src.tolist())
20 solver.solve()
AttributeError: 'pykonal.fields.ScalarField3D' object has no attribute 'is_outdated'
B4. Build (G) from bent rays (2-D cell model)#
We invert a 2-D ((x,z)) slowness perturbation model (cells):
model size = ((n_x-1)\times(n_z-1))
We build (G) by summing segment lengths into the cell that segment midpoints fall into.
def build_G_from_rays_2d(rays, x, z):
# 2-D cells (x,z), collapse y
nx = len(x)
nz = len(z)
dx = x[1]-x[0]
dz = z[1]-z[0]
nxc = nx - 1
nzc = nz - 1
rows, cols, vals = [], [], []
for i, ray in enumerate(rays):
if ray is None or len(ray) < 2:
continue
p = ray
seg = p[1:] - p[:-1]
segL = np.linalg.norm(seg, axis=1)
mid = 0.5*(p[1:] + p[:-1])
ix = np.clip(((mid[:,0] - x.min())/dx).astype(int), 0, nxc-1)
iz = np.clip(((mid[:,2] - z.min())/dz).astype(int), 0, nzc-1)
cid = iz * nxc + ix
order = np.argsort(cid)
cid_s = cid[order]
L_s = segL[order]
start = 0
while start < len(cid_s):
end = start + 1
while end < len(cid_s) and cid_s[end] == cid_s[start]:
end += 1
rows.append(i)
cols.append(int(cid_s[start]))
vals.append(float(L_s[start:end].sum()))
start = end
return sparse.csr_matrix((vals, (rows, cols)), shape=(len(rays), nxc*nzc))
# Rays in reference model (iteration 0)
t_ref0, rays_ref0 = solve_times_and_rays(vp_ref, sources_B, receivers_B, pairs_B, x, y, z)
G0 = build_G_from_rays_2d(rays_ref0, x, z)
print("G0 shape:", G0.shape, "nnz:", G0.nnz)
B5. Iterative update scheme#
At iteration \(k\):
compute \(t^{pred}(u^{(k)})\)
residual \(d^{(k)} = t^{obs} - t^{pred}\)
build \(G^{(k)}\) from rays traced in \(u^{(k)}\)
solve damped LS for \(\delta u^{(k)}\)
update slowness: \(u^{(k+1)} = u^{(k)} + \alpha\,\delta u^{(k)}\)
We apply \(\delta u(x,z)\) uniformly across the thin y dimension.
def invert_damped_sparse(G, d, lam):
nmodel = G.shape[1]
A = sparse.vstack([G, lam*sparse.eye(nmodel)], format="csr")
b = np.concatenate([d, np.zeros(nmodel)])
sol = lsqr(A, b, atol=1e-10, btol=1e-10, iter_lim=5000)
return sol[0], sol
def apply_du_2d_to_3d(vp, du2d, x, z):
# vp is on nodes (nx,ny,nz); du2d is on 2-D cells (nxc*nzc)
nx, ny, nz = vp.shape
nxc, nzc = len(x)-1, len(z)-1
du_cells = du2d.reshape(nzc, nxc).T # (nxc, nzc)
u = 1.0 / vp
# node-wise DU by assigning each node to nearest "below-left" cell
ix = np.clip(np.arange(nx), 0, nxc-1)
iz = np.clip(np.arange(nz), 0, nzc-1)
DU = du_cells[ix[:,None], iz[None,:]] # (nx, nz)
DU3 = DU[:,None,:] * np.ones((1, ny, 1))
u_new = u + DU3
vp_new = 1.0 / np.clip(u_new, 1e-6, None)
return vp_new
def show_du2d(du2d, x, z, title):
nxc, nzc = len(x)-1, len(z)-1
DU = du2d.reshape(nzc, nxc).T # (nxc, nzc)
plt.figure(figsize=(7,3.8))
vmax = np.max(np.abs(DU)) + 1e-12
plt.imshow(DU.T, origin="upper",
extent=(x.min(), x.max(), z.max(), z.min()),
aspect="auto", cmap="seismic", vmin=-vmax, vmax=vmax)
plt.colorbar(label="δu (s/km)")
plt.xlabel("x (km)"); plt.ylabel("z (km)")
plt.title(title)
plt.tight_layout()
B6. Compare ray paths: reference vs true#
Rays bend toward faster regions (lower slowness).
In a low-velocity basin, rays tend to skirt the slowest part if alternative faster paths exist.
def plot_rays_xz(rays, title, nplot=14):
plt.figure(figsize=(7,3.8))
plt.xlim(x.min(), x.max()); plt.ylim(z.max(), z.min())
plt.xlabel("x (km)"); plt.ylabel("z (km)")
plt.title(title)
idx = np.linspace(0, len(rays)-1, nplot).astype(int)
for i in idx:
ray = rays[i]
if ray is None:
continue
plt.plot(ray[:,0], ray[:,2], lw=1.0, alpha=0.8)
plt.scatter(receivers_B[:,0], receivers_B[:,2], marker="^", s=30)
plt.scatter(sources_B[:,0], sources_B[:,2], marker="*", s=45)
plt.gca().invert_yaxis()
plt.tight_layout()
plot_rays_xz(rays_ref0, "Rays traced in reference model (iteration 0)")
plot_rays_xz(rays_true, "Rays traced in true model (for comparison)")
B7. Exercise: run iterative bent-ray tomography#
Tune:
lam_B(damping)alpha(step length)niter(number of iterations)
If you see instability (misfit spikes), reduce
alphafirst.
niter = 5
lam_B = 0.02
alpha = 0.7
vp_k = vp_ref.copy()
history = []
for k in range(niter):
t_pred_k, rays_k = solve_times_and_rays(vp_k, sources_B, receivers_B, pairs_B, x, y, z)
d_k = t_obs - t_pred_k
rms = np.linalg.norm(d_k) / np.sqrt(d_k.size)
print(f"iter {k}: rms residual (s) = {rms:.4f}")
Gk = build_G_from_rays_2d(rays_k, x, z)
du2d, info = invert_damped_sparse(Gk, d_k, lam_B)
vp_k = apply_du_2d_to_3d(vp_k, alpha*du2d, x, z)
history.append((rms, du2d, rays_k))
plt.figure(figsize=(6,3))
plt.plot([h[0] for h in history], marker="o")
plt.xlabel("iteration")
plt.ylabel("RMS residual (s)")
plt.title("Iterative bent-ray tomography: misfit evolution")
plt.tight_layout()
B8. Visualize the recovered update and the updated velocity#
We plot:
recovered \(\delta u(x,z)\) at the last iteration
updated \(V_p\) slice
Interpretation: Compare recovered \(\delta u\) location with the true basin/body locations in the velocity figure at the top of Part B.
rms_last, du_last, rays_last = history[-1]
show_du2d(du_last, x, z, title="Recovered δu (last iteration, 2-D cells)")
show_vslice(vp_k, "Updated Vp after iterations (x–z slice)")
B9. Compare ray paths before/after inversion#
This shows the feedback loop: model → rays → G → update → model.
plot_rays_xz(history[0][2], "Rays at iteration 0 (reference)")
plot_rays_xz(rays_last, "Rays at final iteration (updated model)")
Wrap-up: what you should be able to explain (verbally)#
What exactly is in \(\mathbf{d}\), \(\mathbf{m}\), \(\mathbf{G}\)?
Why does limited ray geometry create null space and smearing?
What does damping assume about the Earth?
What makes bent-ray tomography nonlinear?
Which tuning knobs control stability vs resolution: \(\lambda\), \(\alpha\), geometry?
Optional extensions (good homework or grad add-on)#
Add origin-time unknowns (one per source) into the inversion.
Add station terms (one per receiver).
Replace damping with smoothness (2-D Laplacian) in Part B.
Run a checkerboard test using PyKonal-generated “observations” and invert from a smooth reference.